MaochengHu
576cda45b8
first commit
MaochengHu
576cda45b8
first commit
|
2 jaren geleden | |
|---|---|---|
| .. | ||
| demo | 2 jaren geleden | |
| README.md | 2 jaren geleden | |
| README_cn.md | 2 jaren geleden | |
| vehicle_yolov3_darknet.yml | 2 jaren geleden | |
README.md
English | 简体中文
PaddleDetection applied for specific scenarios
We provide some models implemented by PaddlePaddle to detect objects in specific scenarios, users can download the models and use them in these scenarios.
| Task | Algorithm | Box AP | Download | Configs |
|---|---|---|---|---|
| Vehicle Detection | YOLOv3 | 54.5 | model | config |
Vehicle Detection
One of major applications of vehichle detection is traffic monitoring. In this scenary, vehicles to be detected are mostly captured by the cameras mounted on top of traffic light columns.
1. Network
The network for detecting vehicles is YOLOv3, the backbone of which is Dacknet53.
2. Configuration for training
PaddleDetection provides users with a configuration file yolov3_darknet53_270e_coco.yml to train YOLOv3 on the COCO dataset, compared with this file, we modify some parameters as followed to conduct the training for vehicle detection:
- num_classes: 6
- anchors: [[8, 9], [10, 23], [19, 15], [23, 33], [40, 25], [54, 50], [101, 80], [139, 145], [253, 224]]
- nms/nms_top_k: 400
- nms/score_threshold: 0.005
- dataset_dir: dataset/vehicle
3. Accuracy
The accuracy of the model trained and evaluated on our private data is shown as followed:
AP at IoU=.50:.05:.95 is 0.545.
AP at IoU=.50 is 0.764.
4. Inference
Users can employ the model to conduct the inference:
export CUDA_VISIBLE_DEVICES=0
python -u tools/infer.py -c configs/vehicle/vehicle_yolov3_darknet.yml \
-o weights=https://paddledet.bj.bcebos.com/models/vehicle_yolov3_darknet.pdparams \
--infer_dir configs/vehicle/demo \
--draw_threshold 0.2 \
--output_dir configs/vehicle/demo/output
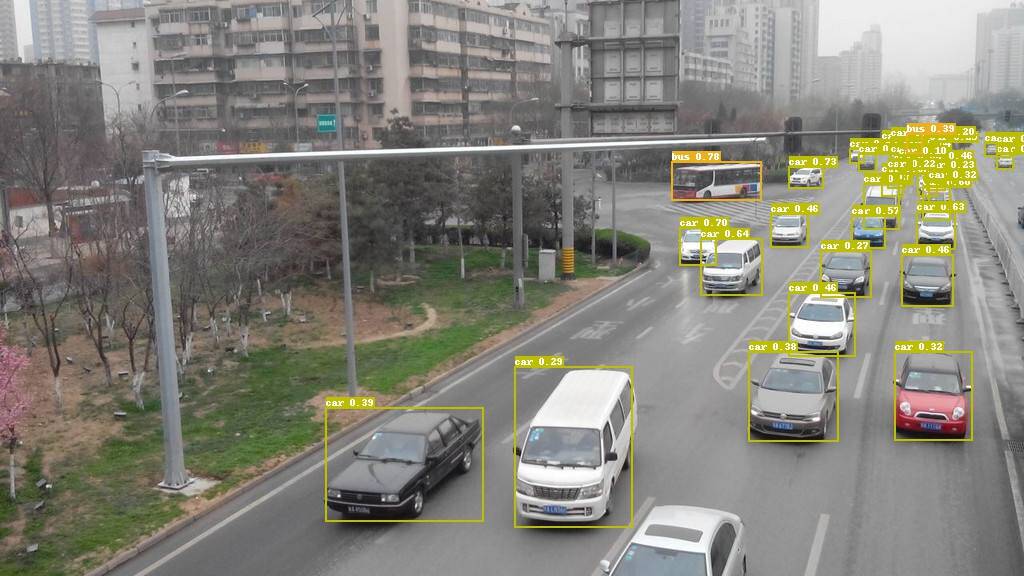
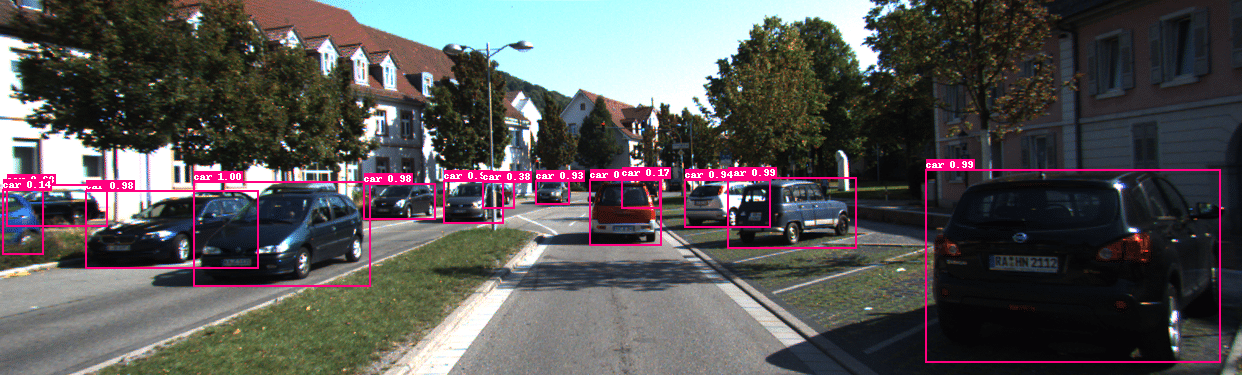
Some inference results are visualized below: