README_cn.md 2.2 KB
English | 简体中文
特色垂类检测模型
我们提供了针对不同场景的基于PaddlePaddle的检测模型,用户可以下载模型进行使用。
| 任务 | 算法 | 精度(Box AP) | 下载 | 配置文件 |
|---|---|---|---|---|
| 车辆检测 | YOLOv3 | 54.5 | 下载链接 | 配置文件 |
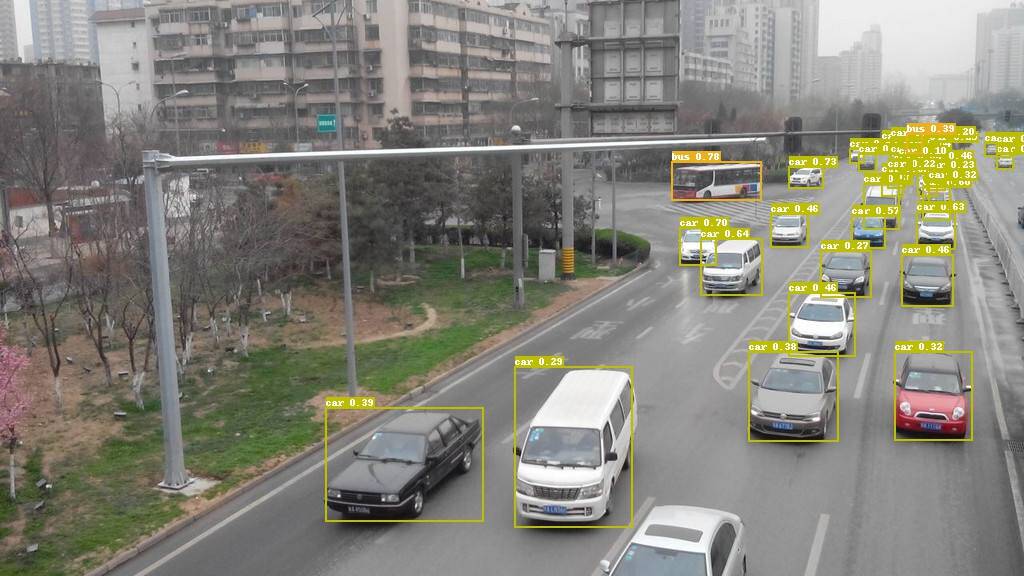
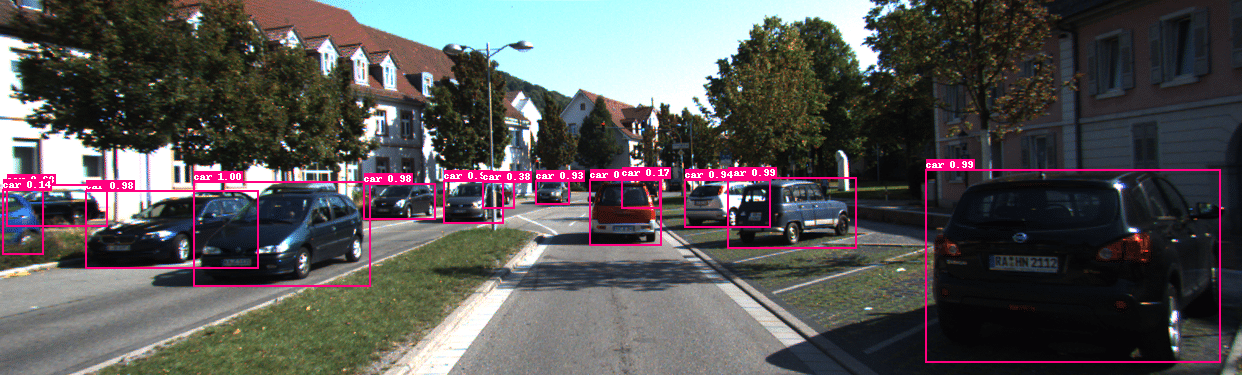
车辆检测(Vehicle Detection)
车辆检测的主要应用之一是交通监控。在这样的监控场景中,待检测的车辆多为道路红绿灯柱上的摄像头拍摄所得。
1. 模型结构
Backbone为Dacknet53的YOLOv3。
2. 训练参数配置
PaddleDetection提供了使用COCO数据集对YOLOv3进行训练的参数配置文件yolov3_darknet53_270e_coco.yml,与之相比,在进行车辆检测的模型训练时,我们对以下参数进行了修改:
- num_classes: 6
- anchors: [[8, 9], [10, 23], [19, 15], [23, 33], [40, 25], [54, 50], [101, 80], [139, 145], [253, 224]]
- nms/nms_top_k: 400
- nms/score_threshold: 0.005
- dataset_dir: dataset/vehicle
3. 精度指标
模型在我们内部数据上的精度指标为:
IOU=.50:.05:.95时的AP为 0.545。
IOU=.5时的AP为 0.764。
4. 预测
用户可以使用我们训练好的模型进行车辆检测:
export CUDA_VISIBLE_DEVICES=0
python -u tools/infer.py -c configs/vehicle/vehicle_yolov3_darknet.yml \
-o weights=https://paddledet.bj.bcebos.com/models/vehicle_yolov3_darknet.pdparams \
--infer_dir configs/vehicle/demo \
--draw_threshold 0.2 \
--output_dir configs/vehicle/demo/output
预测结果示例: